Переходные процессы
Содержание
Переходные процессы¶
Ряды значений при смене состояния в системе часто имеют вид ступеньки. Ситуация смены состояния присутствует в тесте «Ускорение нажатий».
Загрузим маркеры и извлечем данные для первого этапа одного из тестов.
#u='http://uskor.stireac.com/result.tsv/sherdim%40gmail.com/10.132.32.111__6158019760000190311'
u = 'm__10.132.32.111__6158019760000190311.tsv'
M = pd.read_table(u)
coab, coad = 1001, 13
tab = M.t[M.v==coab].iloc[0]
tad = M.t[(M.t>tab) & (M.v==coad)].iloc[0]
R = M[(M.t>=tab)&(M.t<tad)].copy()
# оставим только клавиши - код < 100
R = R[(R.v<100) & (R.v>50)]
R['iri'] = R.t.diff()
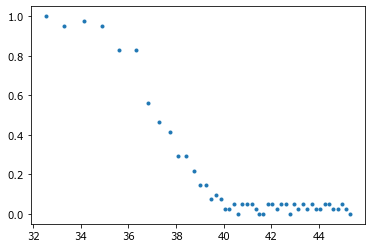
R.plot('t','iri', kind='scatter');
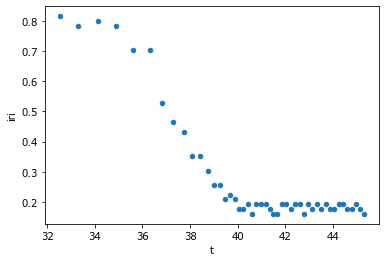
Задача - найти момент перехода от «состояния 0.8» в «состояние 0.2».
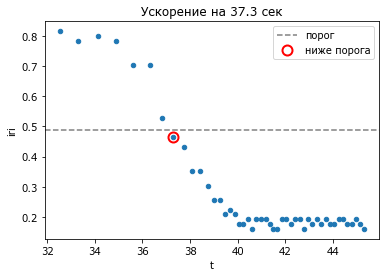
Первый способ - наивный: задать порог как середину между «большими» и «маленькими» значениями.
vbig = R.iri.max() #0.8
vsmall = R.iri.min() #0.2
porog = vsmall + (vbig - vsmall)/2 #0.5
i = argmax(R.iri < porog)
i
8
R.plot('t','iri', kind='scatter');
axhline(porog, ls='--', color='gray', label='порог')
plot(R.iloc[i].t, R.iloc[i].iri, 'o', markersize=10, mew=2, mec='red', mfc=(0,0,0,0), label='ниже порога')
title('Ускорение на {:.1f} сек'.format(R.iloc[i].t))
legend();
А если значения сильно «прыгают» вверх-вниз?
Можно применить сглаживание сигнала, например, с помощью скользящего среднего.
Логистическая кривая¶
Переход между двумя состояниями смоделируем плавной кривой, которая сначала 1, а потом 0. В точке, где кривая будет проходить через 0.5, будет момент перехода.
Так как мы хотим плавные переходы, то основываемся на экспоненте. Экспонента известна своим стремительным ростом, а нам надо за пределы 1 не выходить. Чтобы при увеличении экспоненты мы приближались к нулю, перенесем экспоненту в знаменатель \(y = \frac{1}{e^t}\). Там, где время равно 0, экспонента равна 1. Зная это, мы в этом месте зафиксируем функцию на уровне 0.5 или \(\frac{1}{2}\). Для этого в знаменатель прибавим 1!
t = arange(-5,5,.01)
y = 1/(1 + exp(t))
y_ = 1/(1 + exp(-t))
plot(t, y, 'r-', label='logistic');
plot(t, y_, 'm-', label='retro logistic');
axhline(0.5, ls='--', color='aqua')
grid(True)
legend();
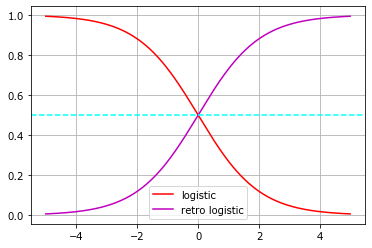
Если пустить время вспять - то есть использовать экспоненциальный спад вместо экспоненциального роста, то получим «отражение» кривой относительно нулевого момента.
Чтобы кривая «двигалась» вдоль оси абсцисс, мы должны добавить в уравнение изменяемый параметр - сдвиг относительно нулевого момента \(t_0\), который мы и хотим найти.
Логистическое уравнение впервые ввел в обиход бельгийский математик Ферхюльст (Pierre François Verhulst) в 1845 году, который занимался моделированием численности населения. Пьер Франсуа писал по-французски, поэтому произносил название функции как «фонксьОн ложистИк».
Для решения уравнения надо выразить \(t_0\) через \(y\), который нам известен, ведь это и есть наши данные.
Второй способ - прокрастинация данных из логистической модели в линейную.
Растянем значения между 0 и 1.
vbig = R.iri.max() #0.8
vsmall = R.iri.min() #0.2
t = R.t.values
y = (R.iri.values - vsmall) / (vbig - vsmall)
plot(t, y, '.');
Так как аргументом логарифмической функции должно быть положительное число, то загоним значения в коридор между 0.01 и 1 и преобразуем в линейную зависимость.
y = np.clip(y, 0.01, 0.99)
ylin = log(1/y - 1)
plot(t, ylin, '.');
axhline(0, lw=1, color='gray');
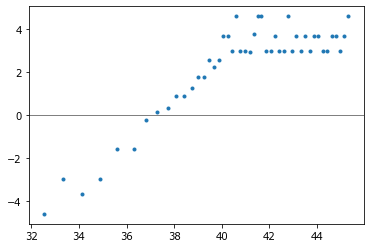
Точечки выстроились в линию, и мы можем найти точку пересечения с осью абсцисс. Числа после 40 с не очень вписываются в зависимость, их мы брать не будем.
bb = (t < 40.5) & isfinite(ylin)
t = t[bb]
ylin = ylin[bb]
Решением линейного уравнения будут такие коэффициенты \(a\) и \(b\), при которых \( \hat{y} = ax + b \) будет максимально близко к \(y\), т.е. остатки \((\hat{y} - y)\) будут минимальными.
Вариант 1. Ручное решение перемножением матриц.
X = vstack([t, ones(shape(t))]).T
X
array([[32.531, 1. ],
[33.315, 1. ],
[34.115, 1. ],
[34.899, 1. ],
[35.603, 1. ],
[36.307, 1. ],
[36.835, 1. ],
[37.299, 1. ],
[37.731, 1. ],
[38.083, 1. ],
[38.435, 1. ],
[38.739, 1. ],
[38.995, 1. ],
[39.251, 1. ],
[39.459, 1. ],
[39.683, 1. ],
[39.891, 1. ],
[40.067, 1. ],
[40.243, 1. ],
[40.435, 1. ]])
ab = ylin.dot(pinv(X).T)
ab
array([ 1.01657639, -37.8654124 ])
Вариант 2. Полином 1-й степени.
poly = polyfit(t, ylin, 1)
poly # Polynomial coefficients
array([ 1.01657639, -37.8654124 ])
Вариант 3. Линейная регрессия
res = stats.linregress(t, ylin)
res
LinregressResult(slope=1.0165763888921415, intercept=-37.86541239882312, rvalue=0.9841356925993817, pvalue=5.707543579625563e-15, stderr=0.04319614854900934)
Вариант 4. OLS (ordinary least squares) model
import statsmodels.api as sm
mo = sm.OLS(ylin, sm.add_constant(t)).fit()
mo.summary()
| Dep. Variable: | y | R-squared: | 0.969 |
|---|---|---|---|
| Model: | OLS | Adj. R-squared: | 0.967 |
| Method: | Least Squares | F-statistic: | 553.8 |
| Date: | Wed, 02 Jun 2021 | Prob (F-statistic): | 5.71e-15 |
| Time: | 07:38:19 | Log-Likelihood: | -11.571 |
| No. Observations: | 20 | AIC: | 27.14 |
| Df Residuals: | 18 | BIC: | 29.13 |
| Df Model: | 1 | ||
| Covariance Type: | nonrobust |
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| const | -37.8654 | 1.627 | -23.271 | 0.000 | -41.284 | -34.447 |
| x1 | 1.0166 | 0.043 | 23.534 | 0.000 | 0.926 | 1.107 |
| Omnibus: | 3.275 | Durbin-Watson: | 1.994 |
|---|---|---|---|
| Prob(Omnibus): | 0.194 | Jarque-Bera (JB): | 2.086 |
| Skew: | 0.791 | Prob(JB): | 0.352 |
| Kurtosis: | 3.054 | Cond. No. | 603. |
Notes:
[1] Standard Errors assume that the covariance matrix of the errors is correctly specified.
mo.params
array([-37.8654124 , 1.01657639])
Сравните названия, которыми в разных вариантах обозначаются полученные значения.
Обратите внимание, что в двух последних вариантах мы получаем оценку точности полученных значений (stderr).
Наше решение там, где прямая проходит через ось абсцисс. Решаем уравнение.
a, b = ab
t0 = -b/a
t0
37.24797547195505
Так как мы получили оценки точности, то можем посчитать минимальное и максимальное возможные решения с учетом погрешности.
b, a = mo.params
berr, aerr = mo.bse
berr, aerr
(1.6271761689595965, 0.043196148549009196)
t0 = -b/a
t0min = -(b-berr)/(a-aerr)
t0max = -(b+berr)/(a+aerr)
t0min, t0max
(40.57262201445649, 34.19435298574704)
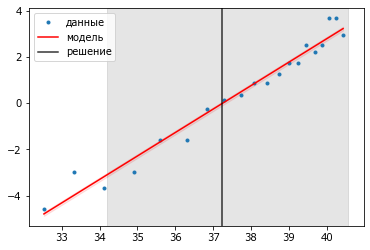
Визуально наложим решение поверх данных.
plot(t, ylin, '.', label='данные');
xx = np.linspace(t[0],t[-1],100)
yy = a*xx + b
plot(xx,yy, 'r', label='модель')
y_std = aerr
k = 2
fill_between(xx, yy - k*y_std, yy + k*y_std, alpha=0.1, color='r')
axvspan(t0min, t0max, color='k', alpha=0.1)
axvline(t0, color='k', alpha=0.8, label='решение')
legend();
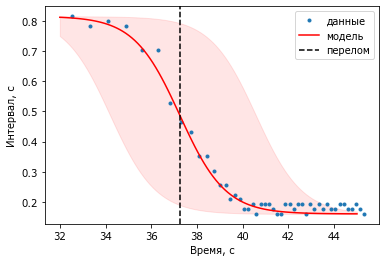
А теперь изобразим модель после преобразования в исходную логистическую зависимость.
Не забываем выполнить депрокрастинацию.
plot(R.t, R.iri, '.', label='данные');
xx = np.linspace(32,45,100)
# для оригинальной модели нам не нужны a и b - только один параметр t0 !
yyori = 1/(1+exp(xx - t0))
yyori = yyori*(vbig - vsmall) + vsmall
plot(xx, yyori, 'r', label='модель')
yyorimax = 1/(1+exp(xx - t0max)) *(vbig - vsmall) + vsmall
yyorimin = 1/(1+exp(xx - t0min)) *(vbig - vsmall) + vsmall
fill_between(xx, yyorimin, yyorimax, alpha=0.1, color='r')
axvline(t0, ls='--', color='k', label='перелом')
xlabel('Время, с')
ylabel('Интервал, с')
legend();
Третий способ - подбор параметров модели.
В полной логистической модели, предполагающей два устойчивых состояния, можно задать четыре параметра.
Сделав такую функцию, подборем ее параметры с помощью метода оптимзации curve_fit (подгонка кривой).
def func(x, u, d, x0, k):
'''Логистическа функция с 4 параметрами
x - данные для преобразования
u - "верхняя полка"
d - "нижняя полка"
x0 - время "прыжка"
k - крутизна "прыжка"
https://en.wikipedia.org/wiki/Logistic_function'''
return ((u-d) / (1+( np.exp(-k*(x-x0))))) + d
# данные для подбора
x, y = R.loc[R.iri.notnull(), ['t','iri']].values.T
# x = x - x[0]
popt, pcov = optimize.curve_fit(func, x, y, method='dogbox',
p0=[ max(y), min(y), x[-1], .1],
bounds=([0, min(y), min(x), -1e8],
[max(y), max(y), max(x), 1e8]),
#maxfev=5000
)
popt
array([ 0.81195291, 0.17677216, 37.27717736, -1.11004778])
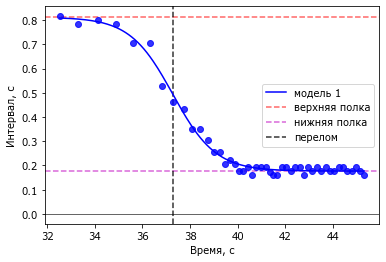
Мы получили четыре искомых параметра. Теперь визуализируем результаты. Для генерации модельных значений будем использовать ту же функцию, но для значений х, плавно изменяющихся от минимума к максимуму.
co = 'b'
label = 'модель 1'
#def plot_model(x,y, popt, co, label):
# '''Функция для рисования данных и модели одним цветом'''
plot(x, y, marker='o', lw=0, color=co, alpha=.8, zorder=3)
xx = linspace(x.min(), x.max(), 200)
yy = func(xx, *popt)
plot(xx,yy, color=co, ls='-', label=label, zorder=10);
axhline(popt[0], color='r', ls='--', alpha=.6, label='верхняя полка')
axhline(popt[1], color='m', ls='--', alpha=.6, label='нижняя полка')
axvline(popt[2], color='k', ls='--', alpha=.8, label='перелом')
axhline(0, color='k', ls='-', lw=1, alpha=.6)
ylabel('Интервал, с')
xlabel('Время, с');
legend();
Для наложения нескольких рисунков один поверх другого удобно иметь в распоряжении функцию, параметрами которой будут данные и параметры отображения - цвет и подпись. При повторном вызове функции можно получить сложный разноцветный рисунок.
Чтобы получить из предыдущего фрагмента кода функцию:
Раскомментируйте строку определения функции и ее описания
Сдвиньте весь нижележащий код вправо на 4 пробела.
#plot_model(x,y, popt, co, label)
#plot_model(x+2,y+0.1, popt+[.1,.1,2,0], 'orange', 'другой процесс')
#plot_model(x+3,y-0.1, popt+[-.1,-.1,3,0], 'green', 'совсем другой процесс')
Нормализация в фиксированном диапазоне¶
На рисунке Рис. 15 Вы можете увидеть две наиболее часто используемых функции для перевода неограниченных значений в ограниченный диапазон от 0 до 1 и от -1 до 1 .
Функции выходят на плато с разной скоростью: сигмоид (обратная логистическая функция) после 3, а гиперболический тангенс - к 2. Входящий \(x\) можно умножить на коэффициент, чтобы добиться разной степени крутизны подъема функции.
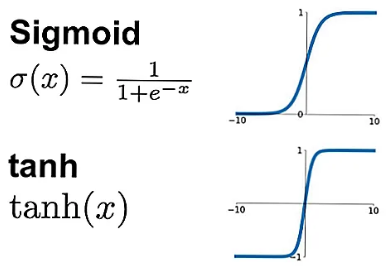
Рис. 15 Функции для нормализации данных в фиксированном диапазоне¶
Функция гиперболического тангенса полезна для понимания свойств комбинаций экспоненциальных функций. Здесь используются растущие и убывающие экспоненты.
x = linspace(-3,3, 100)
y = exp(x) + exp(-x)
plot(x,y, label='сумма');
y = exp(x) - exp(-x)
plot(x,y, ls='--', label='разность');
grid(True);
legend();
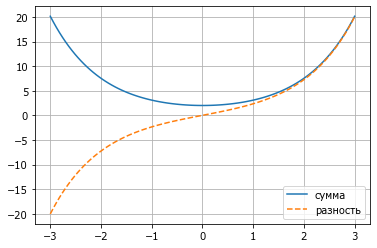
График сумм получается сложением стандартной экспоненциальной функции с обратной ей относительно вертикальной оси. Поскольку экспонента при аргументе меньше 0 убывает, становясь всё меньше единицы, то этот тонкий хвостик не мешает росту обратной функции (с противоположным знаком аргумента) в ту же сторону. Поскольку функции симметричны - образуется «подкова». График разности состоит из дважды зеркально отраженных половинок. Оба графика растут в области положительных значений, и поэтому их отношение всё больше стремится к единице. В области отрицательных значений графики расходятся в противоположные стороны. Поэтому, если мы поделим отрицательные значения для разности на примерно такие же значения для суммы, то получим числа, близкие к -1. В нулевой точке разность разнонаправленных экспонент равна 0, а сумма - 2. \(0/2 = 0\). Поэтому функция гиперболического тангенса проходит через нулевую точку.
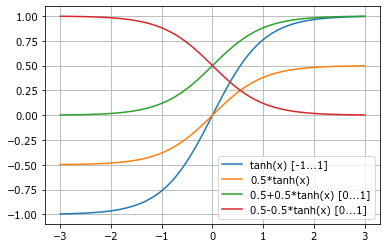
y = tanh(x)
plot(x,y, label='tanh(x) [-1...1]');
plot(x, y*0.5, label='0.5*tanh(x)');
plot(x, (1 + y)*0.5, label='0.5+0.5*tanh(x) [0...1]');
plot(x, (1 - y)*0.5, label='0.5-0.5*tanh(x) [0...1]');
grid(True); legend();